深入浅出了解生成模型-4:一致性模型(consistency model)
前面已经介绍了扩散模型,在最后的结论里面提到一点:扩散模型往往需要多步才能生成较为满意的图像。不过现在有一种新的方式来加速(旨在通过少数迭代步骤)生成图像:一致性模型(consistency model),因此这里主要是介绍一致性模型(consistency model)基本原理以及代码实践,值得注意的是本文不会过多解释数学原理,数学原理推导可以参考:
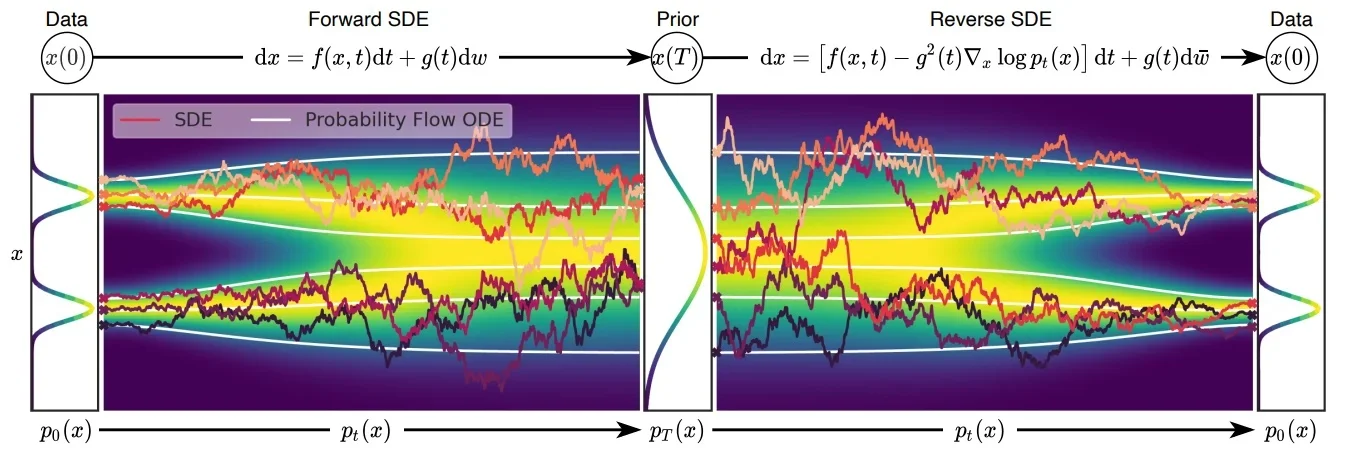
介绍一致性模型之前需要了解几个知识:在传统的扩散模型中无论是加噪还是解噪过程都是随机的,在论文1中(也就是CM作者宋博士的另外一篇论文)将这个随机过程(也就是随机微分方程SDE)转化成“固定的”过程(也就是常微分方程ODE),只有过程可控才能保证下面公式成立。
一致性模型(Consistency Model)
其中
ODE(常微分方程),在传统的扩散模型(Diffusion Models, DM)中,前向过程是从原始图像 $x_0$开始,不断添加噪声,经过 $T$步得到高斯噪声图像 $x_T$。反向过程(如 DDPM)通常通过训练一个逐步去噪的模型,将 $x_T$逐步还原为 $x_0$ ,每一步估计一个中间状态,因此推理成本高(需迭代 T 步)。而在 Consistency Models(CM) 中,模型训练时引入了 Consistency Regularization,使得模型在不同的时间步 $t$都能一致地预测干净图像。这样在推理时,无需迭代多步,而是可以通过一个单一函数$f(x ,t)$ 直接将任意噪声图像$x_t$ 还原为目标图像$x_0$ 。这大大减少了推理时间,实现了一步(或少数几步)生成。
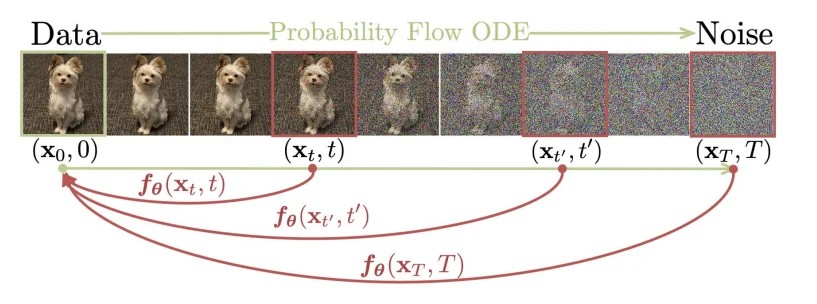
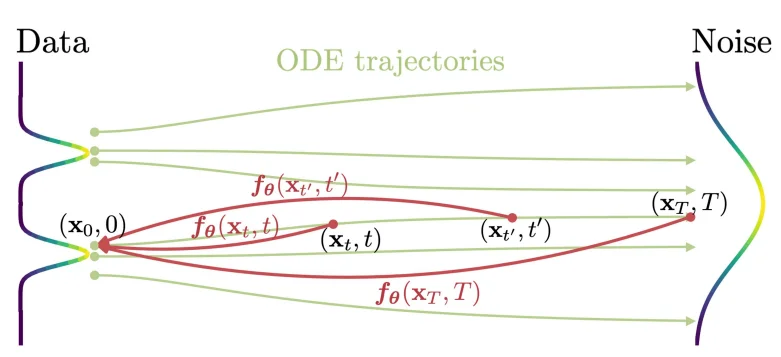
一致性模型(consistency model)在论文2里面主要是通过使用常微分方程角度出发进行解释的。Consistency Model 在 Diffusion Model 的基础上,新增了一个约束:从某个样本到某个噪声的加噪轨迹上的每一个点,都可以经过一个函数 $f$ 映射为这条轨迹的起点(也就是通过扩散处理的图像在不同的时间 $t$都可以直接转化为最开始的图像 $x_0$),用数学描述就是:$f:(x_t, t)\rightarrow x_\epsilon$,换言之就是需要满足: $f(x_t,t)=f(x_{t^\prime},t^\prime)$ 其中 $t,t^\prime \in [\epsilon,T]$,正如论文里面的图片描述:
要满足上面的计算关系,作者在论文里面定义如下的等式关系:
\[f_\theta(x,t)=c_{skip}(t)x+ c_{out}(t)F_\theta(x,t)\]其中等式需要满足:$c_{skip}(\epsilon)=1,c_{out}(\epsilon)=0$ ($c_{skip}(t)=\frac{\sigma_{data}^2}{(t- \epsilon)^2+ \sigma_{data}^2}$, $c_{out}(t)=\frac{\sigma_{data}(t-\epsilon)}{\sqrt{\sigma_{data}^2+ t^2}}$),随着解噪过程(时间从:$T \rightarrow \epsilon$ 其中 $c_{skip}$ 的值逐渐增大,也就是当前的解噪图像占比权重增加),其中我的 $F_\theta$ 就是我们的神经网络模型(比如Unet)。既然使用了神经网络那么必定就需要设计一个损失函数,在论文里面作者设计的损失函数为:两个时间步之间生成得到的图像距离通过最小化这个值(比如说 $\Vert x_{t+1} - x_t \Vert_2$)来优化模型参数。作者对于模型训练给出两种训练方式
直接通过蒸馏模型进行优化
通过直接蒸馏的方式对模型参数进行优化,其中设计的损失函数为:
\[\mathcal{L}_{CD}^N(\boldsymbol{\theta},\boldsymbol{\theta}^-;\phi) = \mathbb{E}[\lambda(t_n)d(\boldsymbol{f}_{\boldsymbol{\theta}}(\mathbf{x}_{t_{n+1}},t_{n+1}),\boldsymbol{f}_{\boldsymbol{\theta}^-}(\hat{\mathbf{x}}_{t_n}^{\boldsymbol{\phi}},t_n))]\]其中 $d$代表距离(比如$l_1$或者 $l_2$)对于上面公式中几个参数:$\theta, \theta^-$,其中 $\hat{x}_{t_n}^\phi$ 代表的是一个预训练的 score model。虽然在CM中损失函数设计上一下子又3个模型,但是实际训练过程中更新的只有一个参数:$\theta$。另外一个参数是直接通过:$\theta^- \leftarrow \mu \theta^-+ (1-\mu \theta) $ 通过指数滑动平均方式进行训练。而另外一个参数 $\phi$是一个确定的函数直接通过ODE solver来进行计算得到,比如在论文3的使用的欧拉求解法:
\[\hat{x}_{t_n}^\phi= x_{t_{n+1}}- (t_n- t_{n+1})t_{n+1}\nabla_{x_{t_{n+1}}}\log p_{t_{n+1}}(x_{t_{n+1}})\]欧拉法: $y_{n+1}= y_n+h*f(t_n, y_n)$ 其中h代表时间步长,f代表当前导数估计。不过值得进一步了解的是,在DL中大部分函数都是直接通过神经网络进行“估算的”,也就是说对于上面的 $\nabla_{x_{t_{n+1}}}\log p_{t_{n+1}} \textcolor{red}{≈} s_\theta(x_{t_{n+1}},t_{n+1})$ 其中 $s_\theta$代表的是训练好的去噪网络。
那么这样一来整个过程就变成了:
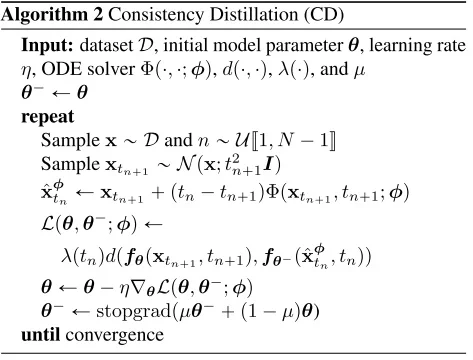
回顾整个过程(直接借鉴上面的流程图),算法比较简单(只不过背后的数学原理蛮复杂),简单描述上面过程就是:对于输入图片通过加噪处理之后得到加噪的图像,损失函数设计就是直接通过计算相邻的两步之间的“距离”最小,对于 $x_{t_{n+1}}$ 我们是已经知道的,但是对于当前时间 $t_n$ 是未知的,因此可以直接通过ODE solver的方式去进行估计,而后再去计算loss并且更新参数。
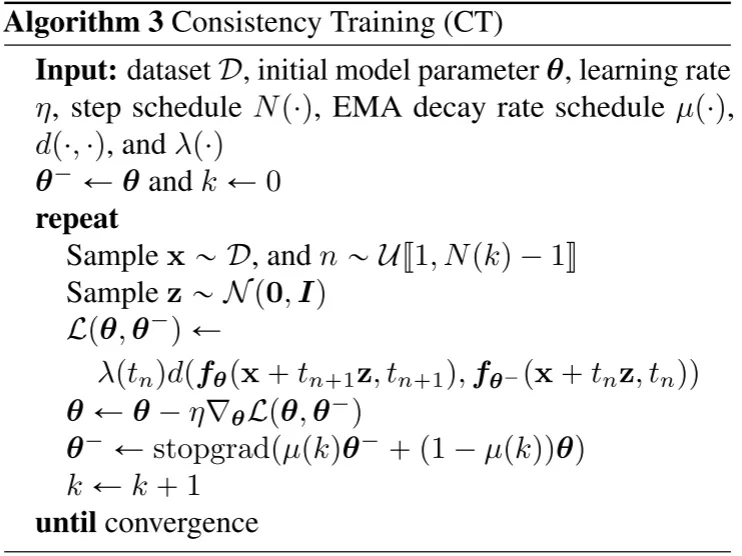
直接训练模型进行优化
直接训练模型进行优化,其中具体的过程为:
LCM/LCM-Lora
潜在一致性模型(Latent Consistency Model)4以及LCM-Lora5(LCM的Lora优微调)通过再latent space中使用一致性模型(stable diffusion model通过VAE将图像进行压缩到latent sapce而后通过DF模型训练并且最后再通过VAE decoder输出),在LCM中主要提出两点:
1、Skipping-Step:因为在最开始的CM中计算两个相邻的时间步之间的loss由于时间步过于接近,就会导致loss很小,因此通过跳步解决这个问题,这样loss就会变成:$d(f(x_{t_{n+\textcolor{red}{k}}}, t_{n+\textcolor{red}{k}}), f(x_{t_n}, t_n))$。
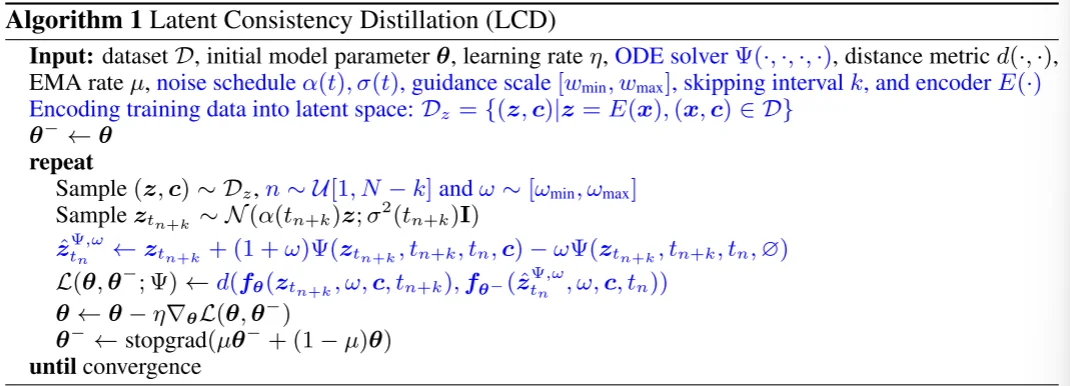
2、引入Classifier-free guidance (CFG) 那么整个loss计算就会变成:$d(f(x_{t_{n+\textcolor{red}{k}}}, \textcolor{red}{w}+ \textcolor{red}{c}, t_{n+\textcolor{red}{k}}), f(x_{t_n}, \textcolor{red}{w}+ \textcolor{red}{c}+ t_n))$,公式中c代表文本,对于CFG而言其实就是一个改进的ODE solver(见下面算法流程中的蓝色部分)
对于LCD算法流程,其中蓝色部分为LCM所修改的内容:
对于最后得到的实验结果分析:
- 不同的k对结果的影响
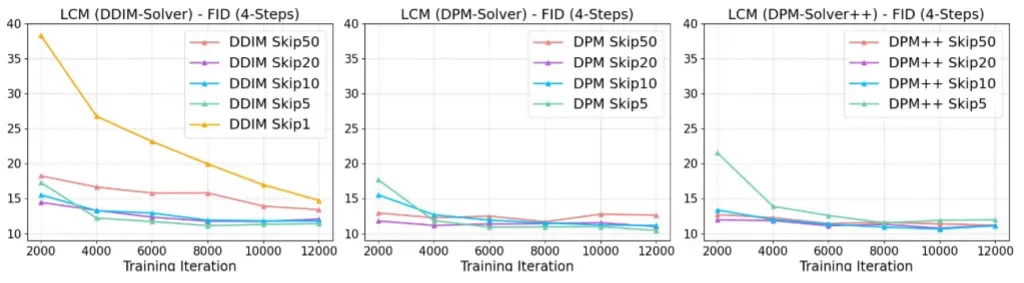
在DPM-solver++和DPM-Solver中基本只需要 2000 步迭代,LCM 4 步采样的 FID 就已经基本收敛了
- 不同的Guidance Scale对结果的影响
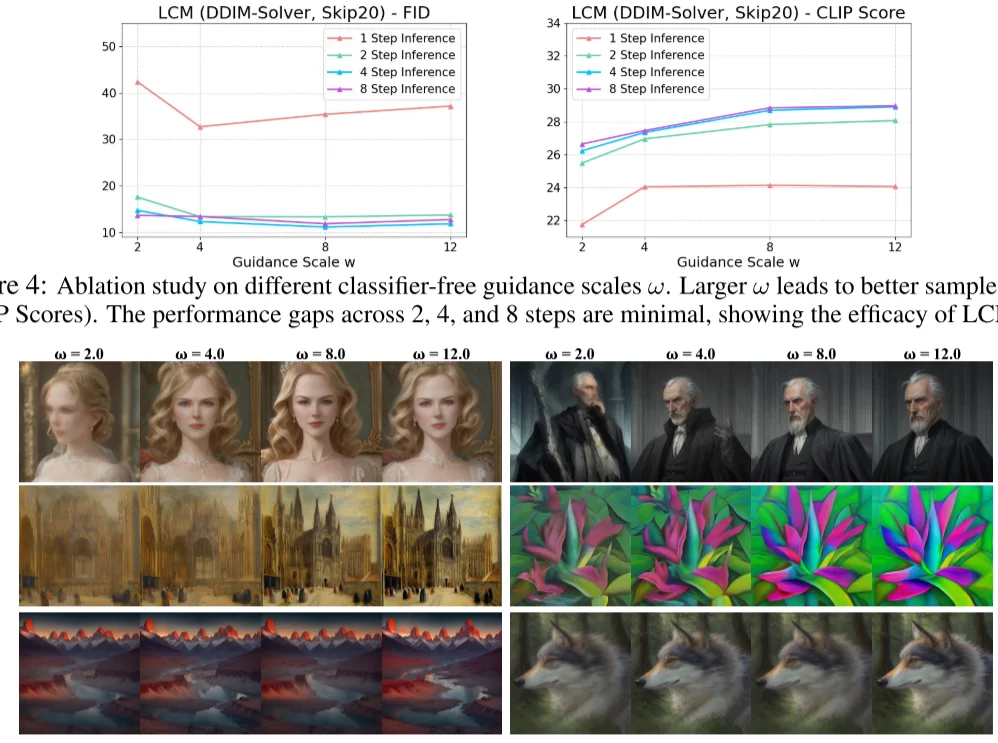
LCM 作者用不同 LCM 的迭代次数与不同 Guidance Scale 做了对比。发现 $w$ 增加有助于提升 CLIP Score,但是损失了 FID 指标(即多样性)的表现。另外,LCM 迭代次数为 2、4、8 时,CLIP Score 和 FID 相差都不大,说明了 LCM 的蒸馏性能确实非常强悍,两步前向的效果可能都足够好了,只是一步前向的结果还差些
TCD6
总结
总的来说consistency model作为一种diffusion model生成(区别与DDPM/DDIM)加速操作,在理论上首先将随机生成过程变成“确定”过程,这样一来生成就是确定的,从 $T\rightarrow t_0$ 所有的点都在“一条线”上等式 $f(x_t,t)=f(x_{t^\prime},t^\prime)$ 其中 $t,t^\prime \in [\epsilon,T]$ 成立那么就保证了模型不需要再去不断依靠 $t+1$ 生成内容去推断 $t$时刻内容。而后续的LCM/LCM-Lora/TCD则是基于CM的原理进行改进。
参考
