torch计算图概念
在深度学习框架中,计算图(英文简称Graph)是一个有向无环图(DAG),它的节点代表操作(例如加法、乘法或者更复杂的函数),边则代表数据(例如张量或者标量)。计算图为深度学习中的前向传播(forward propagation)和反向传播(backward propagation)提供了一个可视化的框架,它能清楚地展示数据是如何流动和操作的。比如说以下面例子为例解释
简单例子
PyTorch 在 forward 时构建一张由 Node 组成的反向执行图,每个 Node 记录局部梯度计算规则和必要上下文,在 backward 时由 Engine 按拓扑顺序逐节点执行并完成梯度传播与累加。
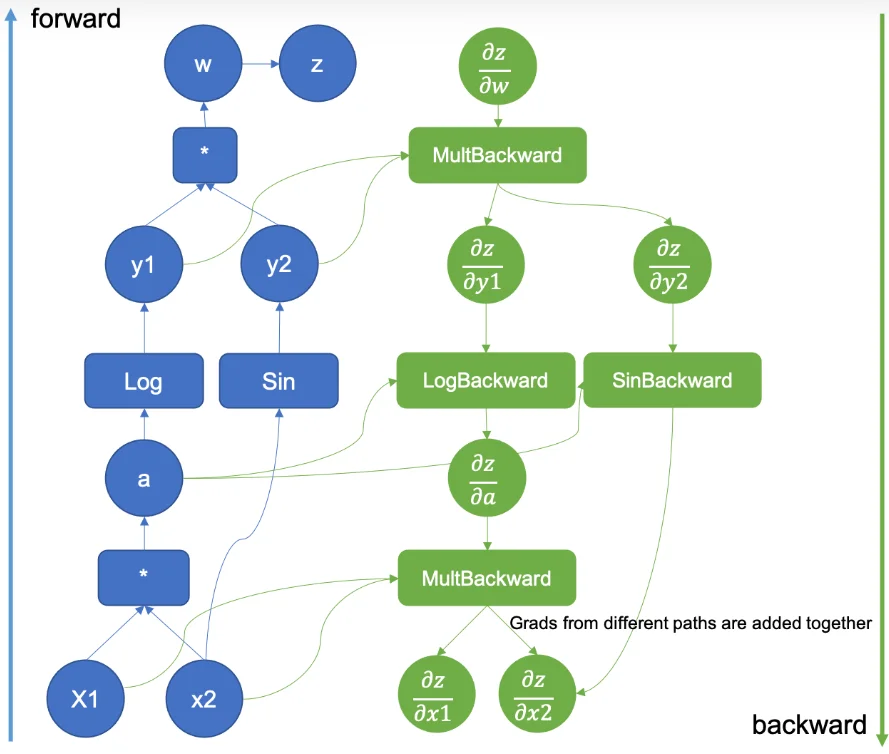
参考上图中给出的例子1,PyTorch 的计算图在底层负责记录张量之间的运算与依赖关系。要点:节点(Node) 为张量或运算;边(Edge)表示数据流,指明某张量由哪个运算生成或某运算的输入来自哪个张量;叶子节点为用户创建且需梯度的张量(requires_grad=True)。PyTorch 是动态图框架:每次 forward 即时构建计算图,执行后默认释放(除非 retain_graph=True)。调用 .backward() 时,框架沿计算图从输出向输入反向传播,逐节点累加梯度并回传到叶子张量(例如 $z=w=y_1\times y_2= \log(a) \times \sin(x_2)=\log(x_1\times x_2)\times \sin(x_2)$ 的梯度由对应运算节点按链式法则逐步计算):
import torch
# 叶子节点
X1 = torch.tensor(2.0, requires_grad=True)
X2 = torch.tensor(3.0, requires_grad=True)
a = X1 * X2 # a = X1 * X2
y1 = torch.log(a) # y1 = log(a)
y2 = torch.sin(X2) # y2 = sin(X2)
w = y1 * y2 # w = y1 * y2
z = w # z = w
a.retain_grad()
y1.retain_grad()
y2.retain_grad()
w.retain_grad()
z.retain_grad()
print("Forward: z =", z.item())
z.backward()
print(f"dz/dz = 1 (输出对自己的梯度永远是1) -> {z.grad.item()}")
print(f"dz/dw = dz/dz * ∂z/∂w = 1 * 1 = {w.grad.item()}")
print(f"dz/dy1 = dz/dw * ∂w/∂y1 = {w.grad.item()} * y2 = {w.grad.item()} * {y2.item()} = {y1.grad.item()}")
print(f"dz/dy2 = dz/dw * ∂w/∂y2 = {w.grad.item()} * y1 = {w.grad.item()} * {y1.item()} = {y2.grad.item()}")
print(f"dz/da = dz/dy1 * ∂y1/∂a = {y1.grad.item()} * (1/a) = {y1.grad.item()} * (1/{a.item()}) = {a.grad.item()}")
print(f"dz/dX1 = dz/da * ∂a/∂X1 = {a.grad.item()} * X2 = {a.grad.item()} * {X2.item()} = {X1.grad.item()}")
print(f"dz/dX2 = dz/da * ∂a/∂X2 + dz/dy2 * ∂y2/∂X2\n"
f" = {a.grad.item()} * X1 + {y2.grad.item()} * cos(X2)\n"
f" = {a.grad.item()} * {X1.item()} + {y2.grad.item()} * {torch.cos(X2).item()}\n"
f" = {X2.grad.item()}")
输出结果为:
Forward: z = 0.2528530955314636
dz/dz = 1 (输出对自己的梯度永远是1) -> 1.0
dz/dw = dz/dz * ∂z/∂w = 1 * 1 = 1.0
dz/dy1 = dz/dw * ∂w/∂y1 = 1.0 * y2 = 1.0 * 0.14112000167369843 = 0.14112000167369843
dz/dy2 = dz/dw * ∂w/∂y2 = 1.0 * y1 = 1.0 * 1.7917594909667969 = 1.7917594909667969
dz/da = dz/dy1 * ∂y1/∂a = 0.14112000167369843 * (1/a) = 0.14112000167369843 * (1/6.0) = 0.023520000278949738
dz/dX1 = dz/da * ∂a/∂X1 = 0.023520000278949738 * X2 = 0.023520000278949738 * 3.0 = 0.07056000083684921
dz/dX2 = dz/da * ∂a/∂X2 + dz/dy2 * ∂y2/∂X2
= 0.023520000278949738 * X1 + 1.7917594909667969 * cos(X2)
= 0.023520000278949738 * 2.0 + 1.7917594909667969 * -0.9899924993515015
= -1.7267885208129883
对于计算图就是对于你的输入数据进行了那种计算方式进行记录,后续梯度反向传播时候通过上面计算图(计算图保存了所有中间变量和梯度信息)来计算梯度更新参数。更加底层的了解一下上述整个过程,通过下面代码访问具体计算图:
def show_graph(fn, indent=0):
if fn is None:
return
print(" " * indent, fn)
for next_fn, _ in fn.next_functions:
show_graph(next_fn, indent + 1)
show_graph(z.grad_fn)
最后输出内容就是:
<MulBackward0 object at 0x7f3aac04af20> z=y2* y3
<LogBackward0 object at 0x7f3aac0494b0> y2=log(y1)
<MulBackward0 object at 0x7f3aac049690> y1=x1*x2
<AccumulateGrad object at 0x7f3aac049600> x1
<AccumulateGrad object at 0x7f3aac049510> x2
<SinBackward0 object at 0x7f3aac0495d0> y3=sin(x2)
<AccumulateGrad object at 0x7f3aac049690> x2
那么在 forward 过程中,Step-1计算 $y1= x1\times x2$,那么此时创建Node:MulBackward0并且保存x1 x2,并且建立关系:
y1.grad_fn → MulBackward0
MulBackward0.next_functions → [AccumulateGrad(x1), AccumulateGrad(x2)]
那么在 backward 过程中,Step-1计算 MulBackward0(z=y2* y3)计算:
dz/dy2 = y3
dz/dy3 = y2
传递:
→ LogBackward0(带 y3)
→ SinBackward0(带 y2)
如果要得到模型具体的计算图下面两种方法:
import torch
from torchviz import make_dot
from torchvision.models import resnet18
"""
apt-get install -y graphviz
pip install torchviz
pip install onnxscript
"""
model = resnet18()
model.eval()
x = torch.randn(1, 3, 224, 224)
y = model(x)
dot = make_dot(y, params=dict(model.named_parameters()))
dot.format = 'png'
dot.render("model_graph")
onnx_file_path = "resnet18_model.onnx"
torch.onnx.export(
model, # 要导出的模型
x, # 虚拟输入
onnx_file_path, # 导出文件路径
export_params=True, # 是否导出权重参数
opset_version=17, # ONNX 算子版本,建议 12 及以上
do_constant_folding=True, # 是否执行常量折叠优化
input_names=['input'], # 输入节点的名称
output_names=['output'], # 输出节点的名称
dynamic_axes={ # 可选:支持动态 Batch Size
'input': {0: 'batch_size'},
'output': {0: 'batch_size'}
}
)
print(f"模型已成功导出至: {onnx_file_path}")
对于第二种可以直接将到处的模型通过网站:https://netron.app/ 去分析每个节点的具体参数以及输入和输出。在torch计算图概念中主要是两种计算方式:1、动态计算图;2、静态计算图,两者之间的核心差异在于前者计算图在 forward 执行过程中边执行边生成(执行每一个运算过程就会生成一个新的节点),而后者计算图在执行前已经完整确定,并作为“可优化程序”执行(提前解析表达式得到计算图)
torch.compile

对于上述图像简单了解几个基本过程2:
第一步:首先通过TorchDynamo —— “动态录音机”(抓图)
当你第一次运行被 torch.compile 装饰的函数时,Dynamo 会“偷偷”接管 Python 的执行。 它不是静态看代码,而是一边模拟运行,一边录音: 把所有 PyTorch 操作(加、乘、卷积、ReLU 等)记录下来,画成一张 FX Graph(一张计算流程图)(对于普通的python操作不会被记录)。 python 的普通代码(if 判断、for 循环、打印等)如果太复杂,就产生 Graph Break(图断开),这部分还是用原来的慢方式运行。 它还会记录“假设”:比如输入 tensor 的形状是 [32, 3, 224, 224]、类型是 float32 等。这些假设叫 Guards(守卫)。 
第二步:AOTAutograd —— “提前准备反向传播”
如果是训练(需要 backward),Dynamo 只抓了前向(forward)。 AOTAutograd 会提前从前向图生成反向图(不用等到真正做 backward 时才临时建图)。 它还会把复杂操作分解成更基础的操作(PrimTorch),让后续优化更容易。 好处:前向+反向可以一起优化,节省内存(不用保存所有中间结果)。
第三步:TorchInductor(默认后端)—— “优化工厂 + 代码生成器”
拿到干净的计算图后,Inductor 开始大改造: 融合操作:把能合并的算子合成一个内核(例如 conv + batchnorm + relu 变成一个 GPU 内核,减少内存读写)。 布局优化、内存复用、循环优化等。 生成代码: GPU 上主要生成 Triton 代码(一种简单却高效的语言,比手写 CUDA 容易,性能接近官方)。 CPU 上生成 C++ 代码。
简单使用
值得注意的是:在torch>2.0之后引入一个新的概念 torch.compile3 在传统的计算过程中,如 x+y那么pytorch就会执行Python 解释器调用函数、检查类型、分配内存、调用 GPU/CPU 操作等操作,这样以来过程就会比较慢,比如说简单的计算:
import torch
def fun1(a, b):
return a+b
fun_compile = torch.compile(fun1)
@torch.compile
def fun2(a, b):
return a+b
基本上只需要对涉及到计算的函数用 torch.compile处理即可(第一次编译速度比较慢,后续计算就快了),直接测试使用compile再模型训练过程中的表现,值得注意的是在使用Trl框架进行强化学习过程中,训练参数直接支持使用 compile(具体位置为:transformers/training_args.py,直接在DPOConfig中进行指定即可,直接使用 torch_compile= True 即可启动),如果是其它训练过程(假设使用accelerator框架进行):
if compile:
s_compile_time = time.time()
model = torch.compile(model, mode="reduce-overhead")
accelerator.print(f"Compile Time: {time.time() - s_compile_time:.2f}s")
...
model, optimizer, train_loader, test_loader = accelerator.prepare(model, optimizer, train_loader, test_loader)
在测试resnet50在CIFAR10数据集上表现如下(代码):
# 使用compile
Compile Time: 0.89s
Epoch 00 | Train Time: 12.17s | Batch Time: 0.14764126466245067Train ACC: 11.19% | Test ACC: 11.89%
Epoch 05 | Train Time: 5.72s | Batch Time: 0.046339944917328506Train ACC: 15.49% | Test ACC: 15.54%
Epoch 10 | Train Time: 5.71s | Batch Time: 0.04499245176509935Train ACC: 18.26% | Test ACC: 19.50%
...
Epoch 85 | Train Time: 5.60s | Batch Time: 0.04556511859504544Train ACC: 37.01% | Test ACC: 39.24%
Epoch 90 | Train Time: 5.70s | Batch Time: 0.04652732245776118Train ACC: 37.74% | Test ACC: 40.30%
Epoch 95 | Train Time: 5.66s | Batch Time: 0.04582754933104223Train ACC: 38.30% | Test ACC: 41.03%
# 不使用compile
Epoch 00 | Train Time: 5.71s | Batch Time: 0.05050786174073511Train ACC: 11.29% | Test ACC: 11.41%
Epoch 05 | Train Time: 5.25s | Batch Time: 0.047670155155415436Train ACC: 15.84% | Test ACC: 16.45%
Epoch 10 | Train Time: 6.11s | Batch Time: 0.04854408575564015Train ACC: 18.56% | Test ACC: 19.64%
...
Epoch 85 | Train Time: 6.00s | Batch Time: 0.048004476391539284Train ACC: 36.92% | Test ACC: 39.01%
Epoch 90 | Train Time: 5.05s | Batch Time: 0.04837274064823073Train ACC: 37.71% | Test ACC: 39.21%
Epoch 95 | Train Time: 5.30s | Batch Time: 0.04843420398478605Train ACC: 38.82% | Test ACC: 40.20%
从上述结果上看,最后ACC差异不大,但是在每个epoch以及batch_time上还是有差异的,于此同时对于在GRPOTrainer上表现如下(只看loss和奖励值,测试的数据以及模型为trl-lib/DeepMath-103K和Qwen2-0.5B-Instruct,其中只使用1%数据):

通过在Resnet以及GRPO两种训练中发现,时间上都会减少并且在模型最后效果是差异不大。下面进一步解释上面没有解释的几个概念。
torch.compile 参数
官方参数中提供的核心参数如下:
backend(后端):决定了计算图最终被转化为何种形式。inductor(默认值):这是最推荐的选择。它使用 TorchInductor 后端,将代码编译为 Triton (针对 GPU) 或 C++ (针对 CPU)。它能提供最深的算子融合和内存优化。cudagraphs:利用 NVIDIA 的 CUDA Graphs 技术,通过减少 CPU 启动 Kernel 的开销来加速小模型。其他:如 onnxrt (ONNX Runtime) 或 tvm,通常用于特定的硬件部署场景。mode(预设模式):1、default:默认模式;2、reduce-overhead:减少开销模式(使用 CUDA Graphs 减少 CPU 启动开销,最适合小 batch 或推理场景,但会增加显存占用);3、max-autotune:最大自动调优模式(使用 Triton 优化算子,如 ReLU、Softmax 等,编译时间较长)fullgraph(全图捕捉):False(默认):如果编译器遇到无法处理的 Python 代码(如使用了复杂的第三方库或特殊的 print 语句),它会将图拆分成几个小图,中间夹杂着 Python 解释器执行。True:强制要求整个模型被捕捉为一张完整的计算图。如果模型中存在无法编译的代码,会直接报错。这通常用于追求极致性能的导出场景。options可以直接向底层后端传递特定的优化指令。可以直接通过torch._inductor.list_options()查看支持哪些操作,除此之外按照官方文档中介绍的几种处理方式:
基础概念
对于最开始提到的3组合概念:1、dynamo;2、AOTAutograd;3、TorchInductor下面逐一进行介绍
dynamo
最上面提到在使用 compile 之前会去获取计算图,之所以要提前获取计算图是因为:pytorch中有些计算如 ReLU(Add(A, B))等,执行逻辑就是先add而后计算relu,但是如果提前获取计算图可以直接通过triton将两部合并为一段代码进而减少计算提高速度(这就是动态计算图和静态计算图之间一个较大的差异,动态计算图便计算边获取图,静态提前获取整个计算图),参考4这些内容理解。比如说在官方示例中对于compile获取计算图过程为:
from typing import List
import torch
from torch import _dynamo as torchdynamo
def my_compiler(gm: torch.fx.GraphModule, example_inputs: List[torch.Tensor]):
print("my_compiler() called with FX graph:")
gm.graph.print_tabular()
return gm.forward # return a python callable
@torchdynamo.optimize(my_compiler)
def toy_example(a, b):
x = a / (torch.abs(a) + 1)
if b.sum() < 0:
b = b * -1
return x * b
for _ in range(100):
toy_example(torch.randn(10), torch.randn(10))
得到的输出是:
对于上述参数解释如下:1、opcode(操作码),placeholder: 函数的输入参数(入口)。 call_function: 调用一个 Python 函数(如 add, mul)。 call_method: 调用一个对象的方法(如 tensor.sum())。 output: 整个图的返回值(出口);2、name: 这个节点在图中的唯一名称(可以理解为变量名)。 3、target: 实际执行的具体函数或目标。 4、args / kwargs: 该操作需要的输入参数。如果参数是 abs_1,表示它引用了前面名为 abs_1 节点的输出。
第一个图:逻辑分支的“上半部分”(对应我的 x = a / (torch.abs(a) + 1)) ,这个图展示了一段包含条件判断的计算逻辑:
输入: 接收两个输入 l_a_ 和 l_b_。
计算路径A: 计算 abs(l_a_) + 1,然后计算 l_a_ / (abs(l_a_) + 1),结果存为 x。
计算路径B: 计算 l_b_.sum(),结果存为 sum_1。
条件判定: 判断 sum_1 < 0,结果存为 lt(此时其为一个bool类型数据)。
输出: 返回了一个元组 (lt, x)。 之所以要返回一个bool类型数据是因为 TorchDynamo 遇到了图中断(Graph Break)。Python 的 if 分支通常无法直接被编译进同一个静态图中。它先编译到 if 判定的地方,根据 lt 的真假,再决定后面走哪个子图。
后两个图:分支后的执行路径,由于代码中可能存在类似 if sum(b) < 0: return x * (-b) else: return x * b 的判断语法,编译器生成了两个不同的子图:子图 2:执行的是 x * (b * -1)。这对应 sum(b) < 0 成立时的逻辑。子图 3 :执行的是 x * b。这对应 sum(b) < 0 不成立时的逻辑。那么最后通过上述过程将图处理为:
def forward(a, b):
# 对应第一个图
abs_1 = abs(a)
add = abs_1 + 1
x = a / add
sum_1 = b.sum()
# 此时发生了 Graph Break (图中断)
# 因为后端需要知道 lt 是 True 还是 False 才能继续
if sum_1 < 0:
# 对应第二个图
return x * (b * -1)
else:
# 对应第三个图
return x * b
compile中具体获取计算图过程56是直接通过捕获计算图是在翻译 Python 字节码7的过程中实现的,还是用最上面的例子直接通过 dis.dis(toy_example) 输出得到字节码:
对于 字节码 简单理解为:在执行python代码(源码)之前会将代码进行编译得到所谓的字节码,然后直接将字节码交给虚拟机执行,那么在
dynamo过程中则是 逐条解释字节码,遇到tensor操作将其记录为计算图节点(可以简单将 计算图 理解为一个栈,遇到和pytorch相关计算就放到这个 栈 中)
11 0 RESUME 0
12 2 LOAD_FAST 0 (a)
4 LOAD_GLOBAL 1 (NULL + torch)
14 LOAD_ATTR 2 (abs)
34 LOAD_FAST 0 (a)
36 CALL 1
44 LOAD_CONST 1 (1)
46 BINARY_OP 0 (+)
50 BINARY_OP 11 (/)
54 STORE_FAST 2 (x)
13 56 LOAD_FAST 1 (b)
58 LOAD_ATTR 5 (NULL|self + sum)
78 CALL 0
86 LOAD_CONST 2 (0)
88 COMPARE_OP 2 (<)
92 POP_JUMP_IF_FALSE 5 (to 104)
14 94 LOAD_FAST 1 (b)
96 LOAD_CONST 3 (-1)
98 BINARY_OP 5 (*)
102 STORE_FAST 1 (b)
15 >> 104 LOAD_FAST 2 (x)
106 LOAD_FAST 1 (b)
108 BINARY_OP 5 (*)
112 RETURN_VALUE
那么dynamo利用这个字节码的逻辑就是,输入:Python 字节码。 处理:逐条扫描字节码,若是 Tensor 运算就记在 FX Graph 账本上,若是普通 Python 逻辑就正常模拟。 结果:产生一个高效的 FX Graph + 一组确保安全的 Guards。
AOTAutograd
dynamo只是获取了forward过程,模型优化(backward过程)在compile中则是通过AOTAutograd进行处理为推理出来的计算图,自动生成配套的反向传播(Backward)计算图。在pytorch中还有一中计算梯度方式也是最常见的计算方式autograd对于这两种之间差异在于:
1、Autograd:你只写前向传播(forward),PyTorch 会在运行时动态记录每一步操作,自动构建一个计算图(computational graph)。当你对 loss 调用 .backward() 时,它就沿着这个图反向走一遍,用链式法则自动算出所有参数的梯度。 整个过程中这个图是动态、临时的:每次 forward 都会重新建图,用完就销毁(除非手动 retain_graph=True)。优点是超级灵活——支持 if、for 循环、任意 Python 代码,调试也方便。但缺点是每次都要重新建图,Python 开销大,不容易做全局优化。
2、AOTAutograd:它和普通 Autograd 的最大区别是:不是在运行时动态建图,而是提前就把前向和反向的整个计算图一次性捕获。第一次运行时,用“假张量”(FakeTensor)模拟一遍 forward,记录下所有操作,生成两个静态的 FX Graph(一个 forward,一个 backward)。这两个图是可分析、可复用、可优化的 Python 对象。
简单总结就是:
Autograd每次计算都会重新去构建图,AOTAutograd提前将图创建好,下次用直接按照图去运行即可(省去创建费时)
TorchInductor
主要是对算子进行融合,比如说$y = \text{ReLU}(Ax + b)$,传统方式要读写三次显存,Inductor 会将其合并为一个 Kernel,数据读入显卡后一次性算完再写回。
参考
https://pytorch.org/blog/computational-graphs-constructed-in-pytorch/ ↩
https://zhuanlan.zhihu.com/p/680288200?utm_psn=2025772286163067927 ↩
https://docs.pytorch.org/tutorials/intermediate/torch_compile_tutorial.html ↩
https://docs.pytorch.org/docs/stable/user_guide/torch_compiler/torch.compiler_dynamo_overview.html ↩